Trikes: daft and oldfashioned child's toys?
.

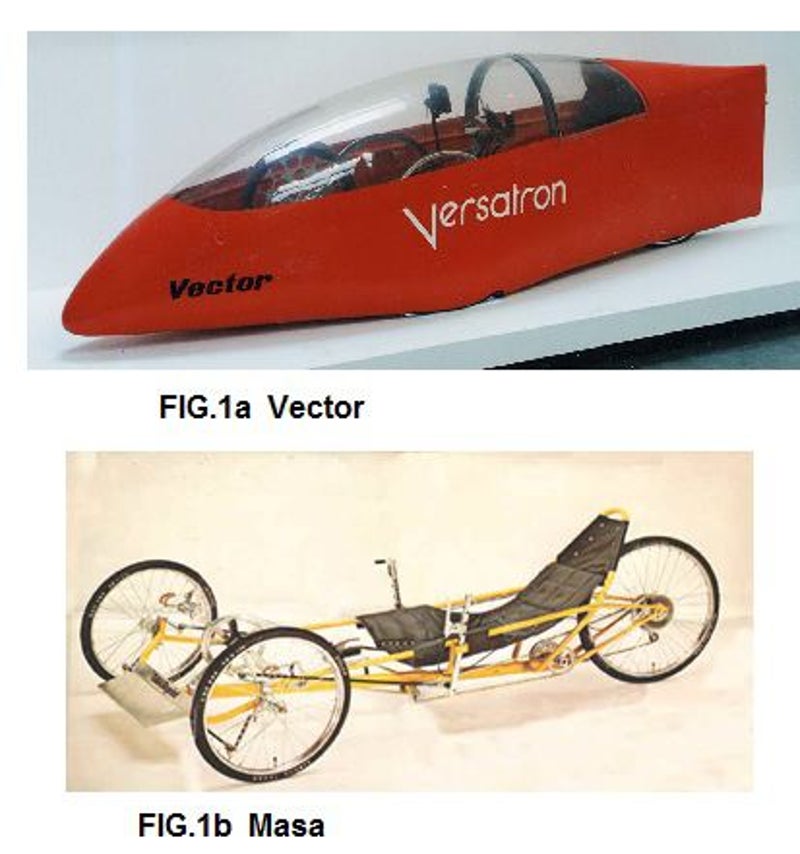
The tandem version of the Vector FIG.1a was the first human powered vehicle to break the 100km / h limit (in 1980). The streamline of the Vector was designed first; the tricycle is built in it. If it really has to go fast, the construction is completely subordinate to the aerodynamics. Below the fairing is a simple tricycle similar to the Masa (1978) of FIG.1b; in this case with rear-wheel drive and front-wheel steering. There are many ways to build tricycles. We have to make choices when designing: which wheel or wheels do we use for the drive and which for the steering. Sometimes we combine drive and steering on the front and / or rear wheels. We will look at some examples of all solutions.
In FIG.2 we see a brief construction drawing of a tricycle from 1985. The Dutch manufacturer Jouta has taken several of these bicycles into production in a short period of time. Not commercially successful, but very nice constructions from a design point of view (see also FIG. 23). The handling of the tricycle from FIG.2, steering with two steering rear wheels, is not self-stabilizing. Using front-wheel steering, the vehicle will want to go straight by itself after exiting the bend, like a car; with this bike you have to keep steering. The front part of the bicycle leans in the corner; just like a two-wheeler. Only that angle of inclination is not determined by the speed, but by the steering head angle in the rear. There is a compromise: when taking the corner too slowly, the rider wants to fall inwards. When taking the corner too fast, the rider wants to go outside. The construction is simple and due to the low center of gravity, the handling is reasonably stable. The wheels of a tricycle experience lateral forces when cornering; so choose thicker spokes and / or smaller wheels. Keep in mind that the brakes on the parallel wheels apply with the same force: otherwise he will want to turn the corner! For steering and driving a tricycle, you can choose from:



Chain drive via a (bicycle) crankset is the usual way of transferring forces. But we could also choose lever drives (see FIG. 11b) or a drive with rowing movements (see FIG.11a Vogabike). Lever drives often work with chains and freewheels via a spring return system. By moving the attachment point on the lever from A to B, we get a continuously adjustable gear system. This principle has been invented many times before! A very well thought-out and highly developed rowing drive is the Snek by Derek Thijs.
Tricycles are not very stable in the bend, because the center of gravity Z is too close to the tilt lines (see FIG. 12). The inner wheel tends to rise when cornering. As soon as the center of gravity is over the tilting line, the tricycle turns over. The center of gravity should be as low as possible and as far as possible from the lines through the rear and front axles. Tricycles with two steering front wheels have a similar steering problem to the car. When we make a turn with such a tricycle, the wheel on the inside will have to make a smaller turning circle than the outer wheel. Both wheels are by means of the steering linkage. The shape of the trapezium is determined by the distance to the center of the rear axle: the Ackerman principle (FIG. 13). Energy losses can occur in the control system due to poor tracking (not running parallel of the wheels) When the wheels point inward, there is “toe-in”; “Toe out” is pointing out, the latter leads to unstable behavior and must be avoided. Both provide additional friction and tire wear. Centerpoint control consumes the least energy, but can be detrimental to stability at high speeds.

Tricycles with one steering front wheel and a normal bicycle front fork must have a relatively greater fork ofset compared to a two-wheeler, about 10-15% greater. If the fork offset is small, the trail is large and the steering characteristics are very stable. At low speeds we then need a somewhat larger steering action to make a turn; a consequence of too great stability.
Some degree of instability is desirable! If the fork offset is large, the forces exerted on the handlebars through the fork will also be great. This makes steering more difficult, especially at high speeds on bumpy roads. When the trail is zero, the vehicle has little stability. When the trail is negative, it wants to go in all directions except straight ahead; this is tiring and dangerous! Reversing the front fork is used, among other things, on draft bikes (behind the derny), but is now also used with front-wheel drive. Steep head tube angles and high fork offset make the steering character more direct. Less steep headset angles and slightly curved forks make the steering character more stable. The shorter the wheelbase (the distance between the front and rear axle), the smaller the offset should be chosen. Motorcycles and mopeds have no fork deflection, but the legs of the front fork are a few centimeters in front of the headtube. If a front fork for a normal bicycle is made straight, the headtube will be at an angle to the front fork.

A differential must be used for two-wheel drive (see FIG. 17). The differential is a patent from a three-wheeled bicycle long before the invention of the explosion engine. The car has benefited a lot from inventions made by the bicycle industry. The differential is a construction to compensate for the difference in wheel revolutions when taking a corner. It is technically possible to propel only one of the two rear wheels; cheaper, but not very elegant. Tricycles with front-wheel drive and two steering front wheels will also need a drive axle with differential in addition to the steering mechanism. We find this construction in cars with front-wheel drive. It is complicated and the losses in the transmission are often significant. In the early eighties some Cylodynes velomobiles were built with a differential + front wheel drive; we also see it in Sidewinder trike (FIG. 7).

Mounting the wheels at an angle, camber, (V-shape) occurs with suspension wheels; when the wheels are compressed, the wheels are vertical again. From time to time wheels are deliberately set in an “inverted V” (see FIG. 18); this deviation from the vertical plane is called camber or camber. This will be beneficial when cornering, but it will put a little higher load on the wheels. It is certainly aerodynamically beneficial for the aerodynamics, which is why it is used in the Mango and the Quest, among others. These velomobiles also show that the designer makes choices! The Mango opts for open wheel arches and a short tail; unfavorable for aerodynamics, but better for maneuverability. The Quest has a long tail and closed wheel arches, optimezed for speed.

If the tricycle has a single steering and driven front wheel, the chain can be diverted via rollers to the hub of the front wheel. Take a steep head angle around 85 ° and a straight fork, see FIG. 20 and FIG. 30). In FIG.21 we see a simple example with front wheel drive and rear wheel steering; the Jouta in FIG. 23 is a modern example with this construction (already discussed in FIG. 2). You can make beautiful designs in plastic, such as the Jouta or the Flevo Versatile from FIG. 22, but wood and steel are much cheaper. The seat is easy to make in wood. Even the frame can be made of wood (see FIG. 24), but we prefer to make the front fork of steel. In general, the simpler the construction, the easier to built the bike.


The Alleweder (FIG.25a / b) uses aluminum plate and rivets; construction is comparable to boats and airplanes. For the steering of this bike, they opted for McPherson suspension. The brakes are then integrated in the suspension fork legs; we also find this construction in the Velomobile and Versatile. The first series of Flevo Alleweders was for sale as a kit; I made one in '94. Even nowadays for sale as a kit

.

Some structures, such as the inclined tricycle in FIG. 27, put entire engineering firms to work. Why foot drive? Manual drive is also possible (FIG.10) and even the folding trike is already available (FIG.5a + b). With the help of a front frame type Newton www.roman-road.co.uk (FIG. 28) it is even possible to convert your racer or ATB into a well-steering tricycle. You can also take a separate rear frame like the Pfiff Furioso (FIG. 26). These tricycles are widely used in disabled sports, see for example http://tricycleassociation.org.uk/
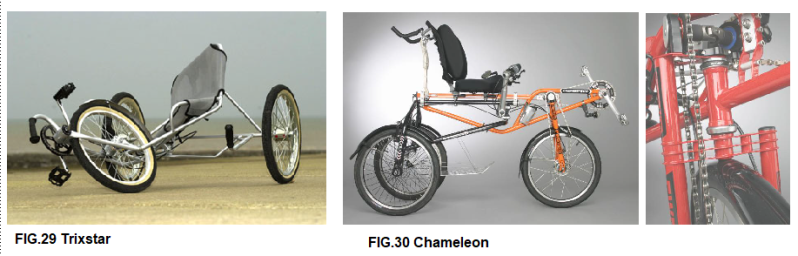
In FIG.29 we see a solution to the problem with fixed angle of inclination with a front-wheel-driven and rear-wheel-steered tricycle, probably the simple joints front-under and rear-above the seat. By pushing your body against the rear frame together with the front frame, this bike even has a minimum turning circle of 2 meters, despite the lack of a handlebar. A similar design is the Brike of FIG. 18.
Very bizarre is the Chameleon (FIG. 30 www.stitesdesign.com); here the front frame is connected to the rear frame via a horizontal bearing (an angle of 0 or 180 degrees). The unstable of the high seating position would, according to the manufacturer, be compensated by the sloping front frame; the handling would be comparable to a two-wheeler. The front fork is steerable via tie rods; the drive is connected to the drive side of the front fork via an universal shaft with universal joint. This makes the control independent of the pedaling movement; technically all ingenious, but aerodynamically a failure.
The Munzo TiltingTrike is a tricycle with sloping rear wheels and only 40cm track width www.fastfwd.nl see FIG. 31 There are thousands of tricycles; reality is always richer: a tricycle is not just a toy and does not have to be boring!
